
Принцип дії мультиплексної мережі CAN
Кабельне з'єднання окремих електричних та електронних пристроїв, що застосовувалося раніше (стандартне кабельне з'єднання) обумовлює пряме з'єднання кожного блоку управління з усіма датчиками та виконавчими елементами, від яких даний блок отримував виміряні значення або якими він керував. За певних обставин це може призвести до надмірної довжини або дублювання кабельних ліній. У порівнянні зі стандартним кабельним розведенням шина даних забезпечує наступні переваги.
1. Провід від датчиків необхідно провести тільки до найближчого блоку управління, який перетворює вимірювані значення пакет даних і передає його на шину даних CAN.
У цьому випадку керувати сервомеханізмом може будь-який інший блок управління, який по шині даних CAN отримує відповідний пакет даних і на його основі розраховує значення керуючого на сервомеханізм.
2. Сигнали з одного датчика (наприклад, з датчика температури охолоджувальної рідини) можуть бути використані різними системами.
3. Поліпшення можливостей діагностування. Оскільки сигнали з одного датчика (напр., сигнал швидкості) використовуються різними системами, то у випадку, якщо повідомлення про несправність видають всі системи, що використовують даний сигнал, несправним є, як правило, датчик або блок управління, що обробляє його сигнали. Якщо повідомлення про несправність надходить тільки від однієї системи, хоча даний сигнал використовується й іншими системами, то причина несправності найчастіше полягає в обробному блоці управління або виконавчому механізмі.
4. Висока швидкість передачі даних до 1 Мбіт/с при макс, довжині лінії 40 м (в даний час на а/м Mercedes Benz не використовується). Швидкість передачі на а/м Mercedes Benz становить від 83 Кбіт/с до 500 Кбіт/с.
5. Декілька повідомлень можуть по черзі передаватися по одній і тій же лінії.
Нижче на рисунках представлені блок-схема мультиплексної мережі та схема розподілу інформації у комплексному сигналі мультиплексної мережі.
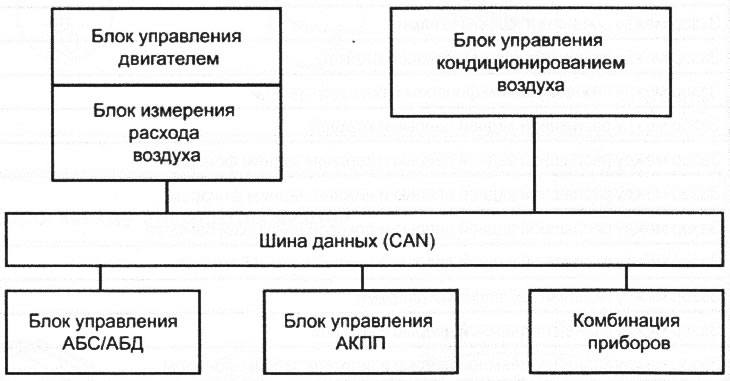
VN 9.001 Зразкова блок-схема мультиплексної (CAN) мережі